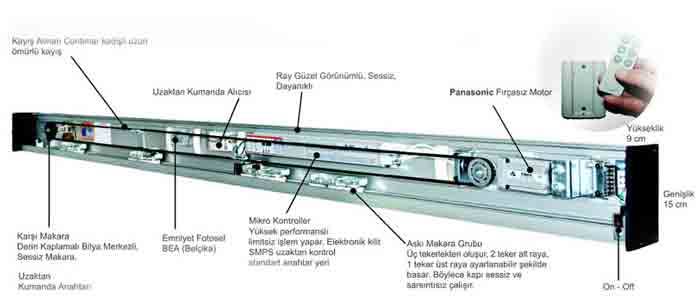
معرفی موتور AC درب اتوماتیک
مقدمه:
موتور AC القایی همگانی ترین موتور در سامانه کنترل حرکت چه خانگی و چه صنعتی است .نوع طراحی مستحکم و در عین حال ساده و به صرفه ، پایین بودن هزینه نگهداری و اتصال ساده و جامع به منبع نیروی AC مزیت ویزه موتور AC درب اتوماتیک است. انواعی از موتور AC القایی در بازار موجود است.موتورهای گوناگون جهت کارهای مختلف تولید شده اندد اند.درست است که طراحی موتور AC درب اتوماتیک از موتور DC راحت تر است ، ولی کنترل گشتاور و شتاب و سرعت در انواع گوناگون موتور AC درب اتوماتیک نیازمند فهمی عمیقتر از چگونگی طرح ریزی مشخصات این نوع موتور است.
حفظ این نکته اساسی در گونه های مختلف ، مشخصه های آنان ، انتخاب عملکرد خاص هر شرایط برای کاربری های متفاوت و روش های کنترل مرکزی موتور AC را در بر می گیرد.
اصل ساخت ابتدایی و نوع کاربرد یک موتور AC سه فاز دارای ناحیه ثابت بیرونی (استاتور) و یک روتور برای چرخش در آن است ، میان این دو یک فاصله از قبل بررسی شده دقیق وجود دارد.
دیگر موتورهای
درب اتوماتیک از یک میدان مغناطیسی دوار برای چرخش روتور استفاده می کنند. موتور
AC سه فاز تنها گونه ای است که میدان مغناطیسی گردان را به صورت طبیعی به وسیله استاتور به دلیل طبع تغذیه کننده آن تولید می کند.
موتور DC نیازمند وسیله ای الکتریکی یا مکانیکی برای تولید این میدان دایره ای هستند. موتور AC تک فاز نیز همین طور.
داخل هر موتور AC دو سری آهنربای مغناطیسی کارگذاشته شده و در یک موتور AC بخشی از مغناطیس شونده ها به دلیل تغذیه موتور AC به پیچ های استاتور متصل میشوند.در ادامه متناوبا تغذیه ولتاژ AC (طبق قانون لنز نیروییی الکترومغناطیسی) به روتور وارد می شود. (دقیقا مشابه ولتاژ ثانویه ترانسفورماتور القا می شود).بدین صورت سریی دیگری از مغناطیس شونده ها خاصیت مغناطیسی میگیرند.(منشا نام موتور القایی از اینجا گرفته شده است).نتیجه تعامل بین این مگنت ها گشتاور را فراهم می آورد و موتور در جهت گشتاور حاصل می چرخد.
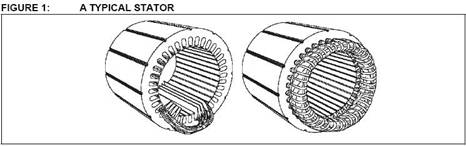
استاتور جنس استاتور از چند قطعه باریک آلومنیوم (آهن سبک) است که به شکل یک سیلندر تو خالی به هم منگنه گشته اند(هسته استاتور).سیم پیچ هایی از سیم روکش دار در این شیار ها پنهان شده اند. هر دسته سیم پیچ با هسته یی مرکزی خود که یک آهنربای مغناطیسی را جهت کار با تغذیه موتور
AC می سازد. تعداد قطب یک موتور
AC به اتصال درونی سیم پیچ های استاتور وابسته است. سیم پیچ استاتور به طور مستقیم به منبع انرژی متصل اند به نحوی که با برقراری تغذیه موتور AC درب اتوماتیک یک میدان مغناطیسی چرخنده تولید می شود.
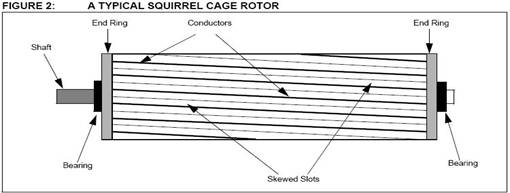
 روتور روتور از چند قطعه مجزای فولادی باریک که بین آن ها میله هایی (مسی یا آلومنیومی) قرار گرفته شده ساخته می شود.در عمومی ترین نوع آن ( قفس سنجابی) میله ها در پایان خود به صورت الکتریکی و مکانیکی توسط حلقه هاییی به هم وصل اند.حدود ۹۰ درصد موتورهای القایی دارای روتور قفس سنجابی اند چون دارای ساختی محکم و ساده است که از هسته ای چند تکه و استوانه ای با محوری با شکاف های موازی برای جا دادن رساناها در آن دارد تشکیل شده است.
روتور روتور از چند قطعه مجزای فولادی باریک که بین آن ها میله هایی (مسی یا آلومنیومی) قرار گرفته شده ساخته می شود.در عمومی ترین نوع آن ( قفس سنجابی) میله ها در پایان خود به صورت الکتریکی و مکانیکی توسط حلقه هاییی به هم وصل اند.حدود ۹۰ درصد موتورهای القایی دارای روتور قفس سنجابی اند چون دارای ساختی محکم و ساده است که از هسته ای چند تکه و استوانه ای با محوری با شکاف های موازی برای جا دادن رساناها در آن دارد تشکیل شده است.
هر شکاف شامل یک میله مسی یا آلومنیومی یا آلیاژی است که در آن ها میله ها دائما به وسیله حلقه های انتهایی خود برقرار است.
این گونه مونتاژ مشابه قفس سنجاب است.میله های روتور با محور به طور دقیق موازی نیستند زیرا به دو جهت قدری اریب نصب می گردند.
اول این که موتور AC با کاهش صوت مغناطیسی بی صدا کار کند و از هارمونیک ها در شکاف ها کم شود. دوم آن که میل روتور به هنگ کردن کم شود.هنگام برابری تعداد دندانه های روتور و استاتور , دندانه روتور به جهت جذب مغناطیسی مستقیم (محض) تلاش می کند در مقابل دندانه های استاتور باقی بماند.
روتور توسط مهار هایی در دو انتهای روی محور نصب شده ; یک منتها الیه محور در حالت عادی برای انتقال نیرو بلندتر از سمت مقابل گرفته می شود. امکان دارد برخی موتوری محوری فرعی در طرف دیگر(غیر چرخنده – غیر انتقال دهنده نیرو) برای وصل دستگاه های حسگر حالت (وضعیت) و سرعت داشته باشد.
وجود شکاف هوایی بین استاتور و روتور به علت القا انرژی از استاتور به روتور انتقال می یابد.تورک تولید شده به روتور نیرو داده و سپس برای چرخیدن استاتور صرف می کند. صرف نظر از روتور مصرفی قواعد کلی دوران یکسان است.
 سرعت یک موتور AC
سرعت یک موتور AC
میدان مغناطیسیی تولیدی در استاتور با سرعت سنکرون می چرخد.(Ns)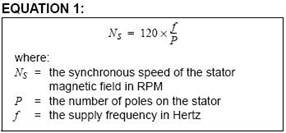
میدان مغناطیسی در روتور تولید می شود چون در حالت عادی ولتاژ متناوب است.
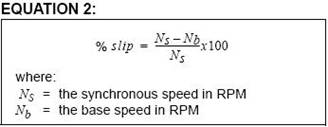
جهت کاهش سرعت نسبی نسبت به (شار) استاتور ، روتور گردش را در آن جهتی که شار استاتور دارد شروع کرده و سعی دارد تا به سرعت دوران فلاکس برسد که البته روتور هرگز موفق نخواهد شد. روتور از سرعت میدان استاتور کم تر می چرخد. این سرعت را Base speed می نامند .(Nb)
تفاوت هایی ما بین Ns و Nb Slip وجود دارد. اسلیپ به مقادیر متفاوت فشار(مکانیکی) بستگی دارد. هر افزایش فشار موجب کندتر شدن کار روتور و بالا رفتن اسلیپ می شود.
بلعکس کاهش فشار باعث شتاب گیری روتور و کاهش اسلیپ می شود. اسلیپ به وسیله درصد نشان داده شده و با فرمول زیر مشخص می گردد.